
Robotic Instruments
Robotic Instrumets group develops miniature robotic instruments and related technologies. Those instruments and technologies can be applied to many biomedical, material and industrial applications, e.g. novel scientific instruments measuring wetting properties of surfaces or viscocity of complex protein structures, new methods for targetted drug delivery for cancer research or diagnosis of diseases, and new tools for integraion of semiconductor and optoelectronic devices.
We are working on acoustic manipulation, magnetic micromanipulation, nanoforce characterization, autonomous micromanipulation, robotic microassembly and self-assembly. The research is highly interdisciplinary, from micro- and nanoscale physics, surface sciences, mechatronics, to automation methods. The research group has extensive collaboration with both academic and industrial partners through EU, Academy of Finland, TEKES, and industrial projects.
 |
Prof. Quan ZhouLeader of the research group Email: firstname.lastname [at] aalto [dot] fi |
 |
 |
 |
Open positions
- PhD student or Postdoc position on precision mechatronic instruments
- For other cases, if you are interested in our research, please contact me with a research proposal. You are also encouraged to apply financial support or scholoarship from other sources to support your research here.
 Research
Research
|
|
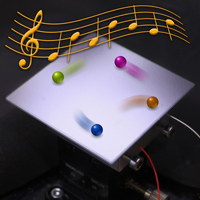
Acoustic manipulationWe have clarified the myth of motion randomness of particles on vibrating plate before they settles to nodal lines since the original experiments of Ernst Chladni in 1780s, and invented a multi-particle single actuator acoustic manipulation method. In contrary to many potential-trapping based acoustic manipulation methods, our technology is based on the out-of-nodal-line motion. By repeatedly measuring the position of objects and playing a selected musical note, our method allows independent trajectory following, pattern transformation, and sorting of multiple miniature objects in a wide range of materials, including electronic components, water droplets loaded on solid carriers, plant seeds, candy balls, and metal parts. Selected publications:
Video: youtube |
|
|
Wetting and microfluidicsWe have invented Scanning Droplet Adhesion Microscopy (SDAM) to measure the fine wetting details of water repellent surfaces. SDAM does not require a direct line of sight, allowing measurement of uneven surfaces such as fabrics or biological surfaces. It is extremely sensitive and 1000 times more precise than the previous wetting characterization methods. In addition, it can detect wetting properties of microscopic functional features that were previously very difficult to measure. We have designed methods to control liquid spreading using simple silicon undercut structures, which can confine the wetting of liquids even with very low surface tension. We have also discovered that the electron beam of environmental scanning electron microscope (ESEM) can create precise patterns that have extreme wetting contrast of 150º and features as small as 1 µm. We also applied the hydrophilic-superhydrophobic patterns for gravity induced rapid deposition of nano-liter droplets. Selected publications:
|
|
|
Surface-tension assisted hybrid microassemblyWe have conducted extensive research on surface-tension assisted hybrid microassembly, including the first extensive study of how self-alignment and robotic pick-and-place can work together, how different process parameters, including surface chemical properties, topographical features, fabrication precision, and material softness, affect the surface-tension driven (or capillary) self-alignment. The work has also been applied to integration of semiconductor chips, laser diodes, and 3D integration of microchips, especially in the EU FP7 project FAB2ASM where Prof. Zhou was the coordinator. Selected publications:
|
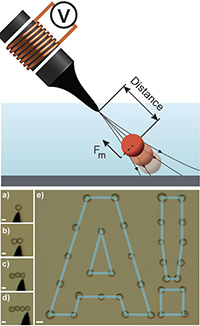 |
Micromanipulation using robotic electromagnetic needleWe have developed robotic eletromagnetic needle for selective picking and precise manipulation of magnetic microparticles in liquid medium. We control precisely the magnetic field at the micro sharp needle tip to allow picking of single magnetic microparticles in a population, and can place multiple magnetic microparticles at precise locations or one against another. Selected publications:
|



Group members
| Quan Zhou | Professor, leader of the group |
| Jean-Antoine Seon | Postdoctoral researcher |
| Jin Tao | Postdoctoral researcher |
| Povilas Valiauga | Commercialization specialist |
| Zoran Cenev | Ph.D. student |
| Kourosh Latifi | Ph.D. student |
| Harri Wijaya | Ph.D. student |
| Anastasiia Kravtcova | Ph.D. student |
| Diluka Harischandra | Ph.D. student |
| Jaakko Mattila | M.Sc. thesis worker |
| Shahriar Najafi Haeri | M.Sc. thesis worker |
| Artur Kopita | Research assistant |
Selected publications
- Mapping microscale wetting variations on biological and synthetic water-repellent surfaces, V. Liimatainen, M. Vuckovac, V. Jokinen, V. Sariola, M.J. Hokkanen, Q. Zhou & R.H.A. Ras, Nature Communications 8, 1798, 2017.
- Manipulating Superparamagnetic Microparticles with an Electromagnetic Needle, Z. Cenev, H. Zhang, V. Sariola, A. Rahikkala, D. Liu, H.A. Santos, Q Zhou, Advanced Materials Technologies, 2017.
- Controlling the motion of multiple objects on a Chladni plate, Q. Zhou, V. Sariola, K. Latifi, V. Liimatainen, Nature Communications 7, 12764, 2016.
- Maskless, High‐Precision, Persistent, and Extreme Wetting‐Contrast Patterning in an Environmental Scanning Electron Microscope, V. Liimatainen, A. Shah, L.S. Johansson, N. Houbenov, Q. Zhou, Small 12 (14), 1847-1853, 2016.
- Sliding droplets on hydrophilic/superhydrophobic patterned surfaces for liquid deposition, B. Chang, Q. Zhou, R.H.A. Ras, A. Shah, Z. Wu, K. Hjort, Applied Physics Letters 108 (15), 154102, 2016.
- Self-transport and self-alignment of microchips using microscopic rain, B. Chang, A. Shah, Q. Zhou, R.H.A. Ras, K. Hjort, Scientific reports 5, 2015.
- Surface tension-driven self-alignment of microchips on low-precision receptors, I. Routa, B. Chang, A. Shah, Q. Zhou, Journal of Microelectromechanical Systems 23 (4), 819-828, 2014.
- Controlling liquid spreading using microfabricated undercut edges, V. Liimatainen, V. Sariola, Q. Zhou, Advanced Materials 25 (16), 2275-2278, 2013.
- Surface-tension driven self-assembly of microchips on hydrophobic receptor sites with water using forced wetting, B. Chang, A. Shah, I. Routa, H. Lipsanen, Q. Zhou, Applied Physics Letters 101 (11), 114105, 2012.
- Hybrid microassembly combining robotics and water droplet self-alignment, V. Sariola, M. Jääskeläinen, Q. Zhou, IEEE Transactions on Robotics 26 (6), 965-977, 2010.
More publications can be found at Aalto research database.